Hyundai Palisade (LX2): Forward Collision-Avoidance Assist (FCA) System / Schematic diagrams
Hyundai Palisade (LX2) 2020-2026 Service Manual / Brake System / Forward Collision-Avoidance Assist (FCA) System / Schematic diagrams
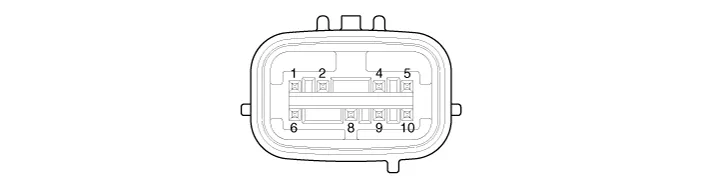
| Schematic Diagram |

| Terminal Function |
|
No |
Function |
|
1 |
IGN |
|
2 |
- |
|
3 |
- |
|
4 |
L-CAN High |
|
5 |
L-CAN Low |
|
6 |
- |
|
7 |
- |
|
8 |
C-CAN High |
|
9 |
C-CAN Low |
|
10 |
GND |
Components The following is the configuration of the FCA system. [Basic specification (Front camera applied)] – Detection device (radar and camera) that can recognize potential obstacles in the front.
Inspection Driver Setting – The ON/OFF for FCA is included in the USM (User Setting Menu) and the default is ON.
Categories
- Manuals Home
- Hyundai Palisade Owners Manual
- Hyundai Palisade Service Manual
- Scheduled maintenance services
- How to reset the power liftgate
- Cylinder Head
- New on site
- Most important about car

Copyright © 2026 www.hpalisadelx.com - 0.0109