Hyundai Palisade (LX2): Blind-Spot Collision Warning/ Blind-Spot Collision-Avoidance Assist / Limitations of the System
The driver must be cautious in the below situations because the system may not detect other vehicles or objects in certain circumstances:
- When a trailer or carrier is installed.
- The vehicle driven in inclement weather such as heavy rain or snow.
- The sensor is polluted with rain, snow, mud, etc.
- The rear bumper where the sensor is located is covered with a foreign object such as a bumper sticker, a bumper guard, a bike rack, etc.
- The rear bumper is damaged, or the sensor is out of the original default position.
- The vehicle height gets lower or higher due to heavy loading in a luggage compartment, abnormal tire pressure, etc.
- When the temperature of the rear bumper is high.
- When the sensors are blocked by other vehicles, walls or parking-lot pillars.
- The vehicle is driven on a curved road.
- The vehicle is driven through a tollgate.
- The road pavement (or the peripheral ground) abnormally contains metallic components (i.e. possibly due to subway construction).
- There is a fixed object near the vehicle, such as a guardrail.
- While going down or up a steep road where the height of the lane is different.
- Driving on a narrow road where trees or grass or overgrown.
- Driving in rural areas where the sensor does not detect another vehicle or structure for an extended period of time.
- Driving on a wet road.
- Driving on a road where the guardrail or wall is in double structure.
- A big vehicle is near such as a bus or truck.
- When the other vehicle approaches very close.
- When the other vehicle passes at a very fast speed.
- While changing lanes.
- If the vehicle has started at the same time as the vehicle next to you and has accelerated.
- When the vehicle in the next lane moves two lanes away from you OR when the vehicle two lanes away moves to the next lane from you.
- A motorcycle or bicycle is near.
- A flat trailer is near.
- If there are small objects in the detecting area such as a shopping cart or a baby stroller.
- If there is a low height vehicle such as a sports car.
- The brake pedal is depressed.
- ESC (Electronic Stability Control) is activated.
- ESC (Electronic Stability Control) malfunctions.
- The tire pressure is low or a tire is damaged.
- The brake is reworked.
- The vehicle abruptly changes driving direction.
- The vehicle makes sharp lane changes.
- The vehicle sharply stops.
- Temperature is extremely low around the vehicle.
- The vehicle severely vibrates while driving over an uneven//bumpy road, or concrete patch.
- The vehicle drives on a slippery surface due to snow, water puddle, or ice.
- The Lane Keeping Assist (LKA) does not operate normally. For more details refer to "Lane Keeping Assist (LKA) system" in this chapter.
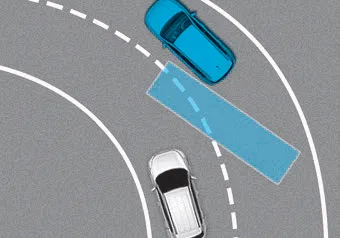
• Driving on a curve
The BCW and BCA systems may not operate properly when driving on a curved road. In certain instances, the system may not detect the vehicle in the next lane. Always pay attention to road and driving conditions, while driving.
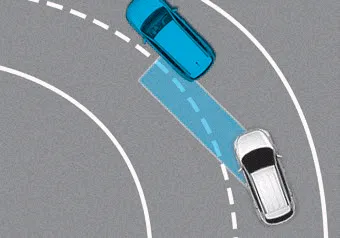
The BCW and BCA systems may not operate properly when driving on a curved road. In certain instances, the system may recognize a vehicle in the same lane.
Always pay attention to road and driving conditions, while driving.
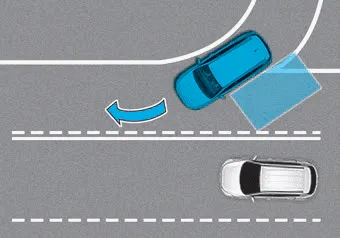
• Driving where the road is merging/ dividing
The BCW and BCA systems may not operate properly when driving where the road is merging/dividing. In certain instances, the system may not detect the vehicle in the next lane.
Always pay attention to road and driving conditions, while driving.
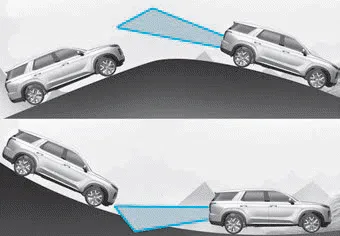
• Driving on a slope
The BCW and BCA systems may not operate properly when driving on a slope. In certain instances the system may not detect the vehicle in the next lane.
Also, in certain instances, the system may recognize the ground or structures.
Always pay attention to road and driving conditions, while driving.
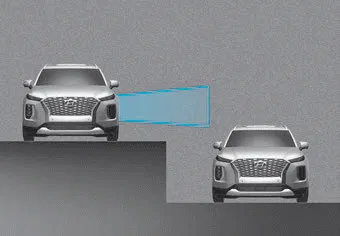
• Driving where the heights of the lanes are different
The BCW and BCA systems may not operate properly when driving where the heights of the lanes are different.
In certain instances, the system may not detect the vehicle on a road with different lane heights (i.e. underpass joining section, grade separated intersections, etc.).
Always pay attention to road and driving conditions, while driving.
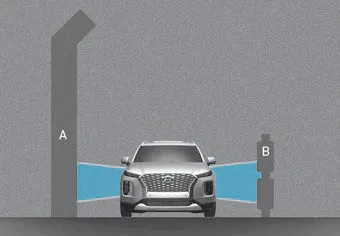
[A] : noise barrier, [B] : guardrail
• Driving where there is a structure beside the road
The BCW and BCA systems may not operate properly when driving where there is structure beside the road.
In certain instances, the system may recognize the structures (i.e. noise barriers, guardrail, double guardrail, median strip, bollard, street light, road sign, tunnel wall, etc.) beside the road.
Always pay attention to road and driving conditions, while driving.
Information
This device complies with Part 15 of the FCC rules.
Operation is subject to the following two conditions:
1. This device may not cause harmful interference.
2. This device must accept any interference received, including interference that may cause undesired operation.
â– Front camera â– Rear radar Front camera The front camera function as a sensor detecting the lane. If the sensor is covered with snow, rain or foreign substance, the system may temporarily be canceled and not work properly.
System Description Rear Cross-Traffic Collision Warning (RCCW) system The Rear Cross-Traffic Collision Warning (RCCW) system uses radar sensors to monitor the approaching cross traffic from the left and right side of the vehicle when your vehicle is in reverse.
Other information:
Hyundai Palisade (LX2) 2020-2026 Service Manual: Special service tools
Special Service Tools Tool Name / Number Illustration Description LKA Compensator (09890-3V100) Used for compensating front view camera unit Tolerance Compensation Plate for Surround View Monitoring (09957-CM100)
Hyundai Palisade (LX2) 2020-2026 Service Manual: Description and operation
Description The smart cruise control system allows a driver to program the vehicle to control the speed and following distance by detecting the vehicle ahead without depressing the brake pedal or the accelerator pedal. 1.
Categories
- Manuals Home
- Hyundai Palisade Owners Manual
- Hyundai Palisade Service Manual
- Rain Sensor
- Body Electrical System
- Engine Mechanical System
- New on site
- Most important about car
